
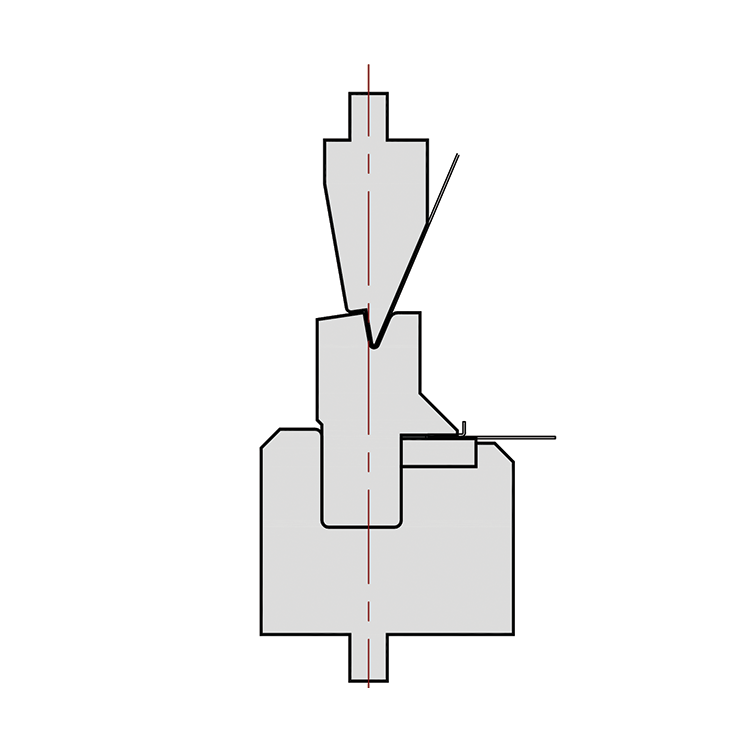
ABB Robotics on X: #ABB patented roller #hemming has a robust design with the ability to control the hemming pressure along the entire flange length. It is less sensitive to flange angle
4.8
(673)
Write Review
More
$ 36.99
In stock
Description

Optimal design for compliance modeling of industrial robots with bayesian inference of stiffnesses

An efficient leg with series–parallel and biarticular compliant actuation: design optimization, modeling, and control of the eLeg - Wesley Roozing, Zeyu Ren, Nikos G Tsagarakis, 2021
ABB Axccellus

Industrial Robots - ABB Robotics

ABB launches breakthrough robot alignment software increasing electronics manufacturing speed and accuracy

US7685902B2 - Industrial robot - Google Patents

US7685902B2 - Industrial robot - Google Patents

5 Flange Interface on ABB IRB6400 Robot

Industrial Robots - ABB Robotics




You may also like



