Kinematic model of a hand: each finger has 3 joints with 4 DoF : index
4.7
(109)
Write Review
More
$ 15.50
In stock
Description
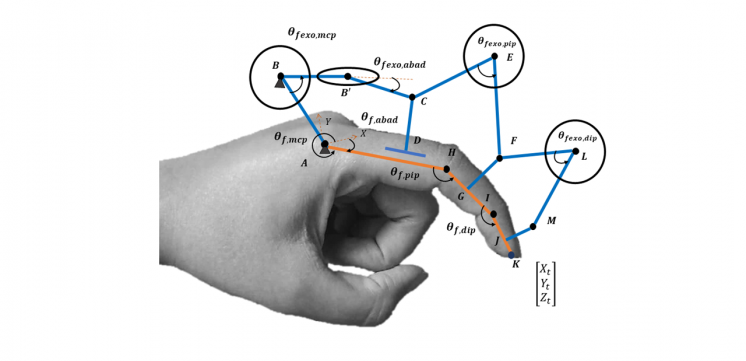
Fingertip Position and Force Control through Maestro Hand Exoskeleton
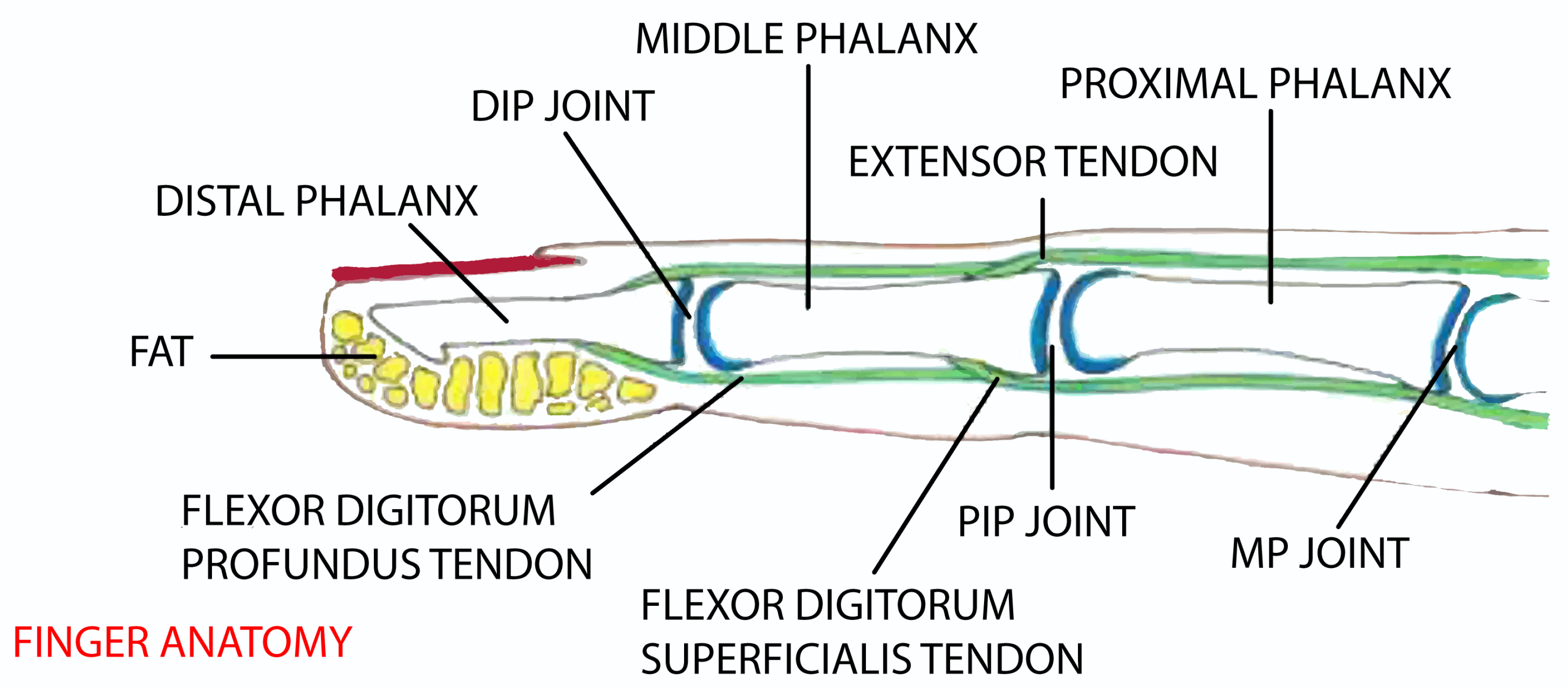
Finger joint models used in our method
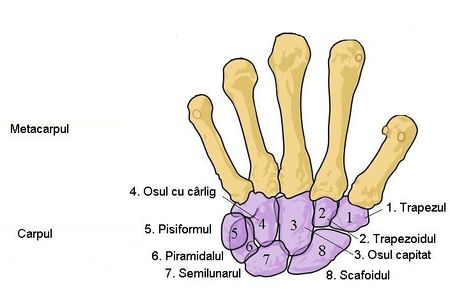
26 DOF skinned hand model; kinematic tree (left), digital skeleton

Your Ring Finger And Index Finger Reveal Whether You Are – Otosection
Robotics, Free Full-Text
Wrist and Hand - Physiopedia

DLR Multi-fingered Hands

Kinematic model of index finger

InverseKinematics

Formalization of the inverse kinematics of three-fingered dexterous hand - ScienceDirect
Related products



You may also like