The Engineer - Nature inspires entangled filaments gripper
Researchers from the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) have taken inspiration from nature to develop a new robotic gripper.

Soft Tendril-Inspired Grippers: Shape Morphing of Programmable Polymer–Paper Bilayer Composites

From grasping to manipulation with gecko-inspired adhesives on a multifinger gripper

Knitting from Nature: Self-Sensing Soft Robotics Enabled by All-in-One Knit Architectures

Active entanglement enables stochastic, topological grasping

This Squishy Octopus Robot Snatches Up Fragile Objects with Ease - Nerdist
Robots make quick grab for objects in complex environments
Actuators, Free Full-Text

Nature-inspired researchers develop elephant trunk gripper
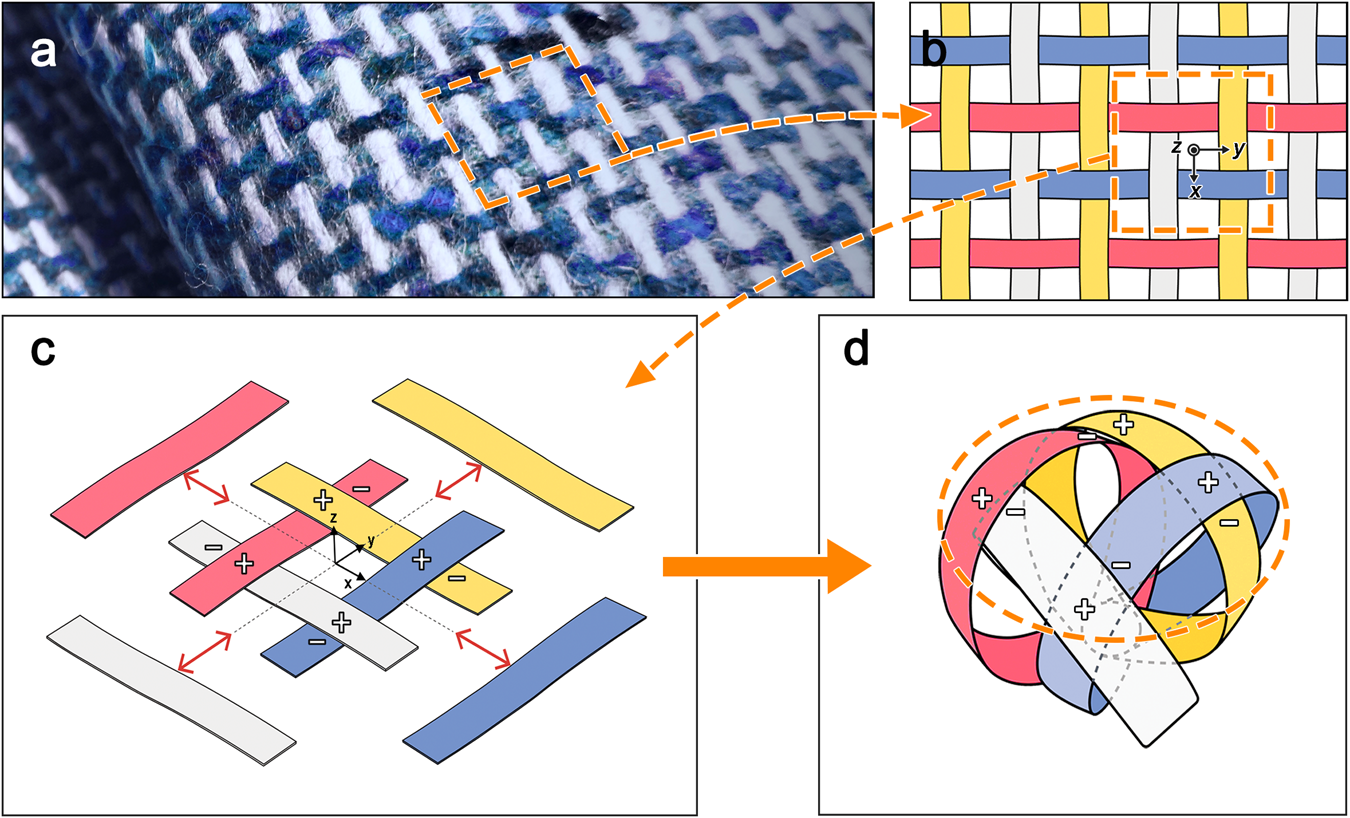
Grasping through dynamic weaving with entangled closed loops

Bio-inspired 3D-printed lattice structures for energy absorption applications: A review - Doodi Ramakrishna, Gunji Bala Murali, 2023

Bio‐Inspired Soft Grippers Based on Impactive Gripping - Zhou - 2021 - Advanced Science - Wiley Online Library